6-DOF Precision Motion
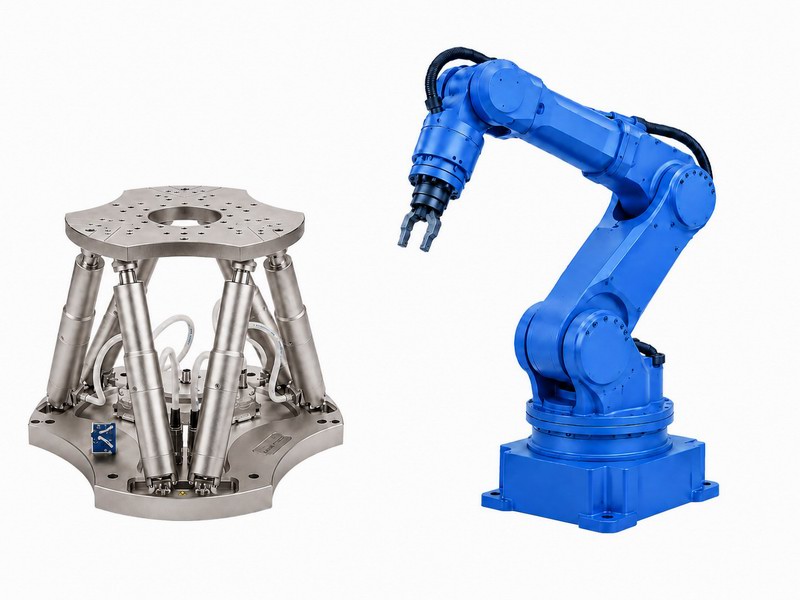
6-Axis Hexapod Parallel Platforms vs Traditional 6-Axis Robots
Hexapods and 6-axis precision stages are used in high-accuracy test, assembly, manufacturing, laser processing, optics and photonics alignment. Hexapod 6-DOF platforms provide coordinated motion in X, Y, Z, pitch, yaw and roll from a compact parallel-kinematic structure. Articulated 6-axis robots are based on serial kinematics.
Precision 6-Axis Motion Platforms
Hexapods are also known as Stewart platforms or 6-DOF parallel robots. Unlike stacked serial stage systems, all six actuators work together on one moving platform. This parallel-kinematic architecture provides high stiffness, compact mechanics, flexible coordinate transformation and a programmable pivot point for precision alignment and metrology tasks.
Read the FAQ blog for more information on 6-axis stages, motion platforms and parallel robots.
6-Axis Stage and Hexapod Videos
6-Axis Motion Platform Based on High-Performance Voice-Coil Linear Motors
Hexapod 6-Axis Stages: Advantages and Applications
Fastest Way to Program a Hexapod 6-Axis Precision Robotic Stage
6-Axis Robotic Stage / Motion Platform Catalog
Download the catalog for additional information on 6-axis robotic stages, motion platforms and hexapod positioning systems.

5 Key Differences Between Parallel-Kinematic Hexapods and Traditional 6-Axis Robots
Parallel-kinematic hexapods and traditional 6-axis industrial robots both provide motion in six degrees of freedom, but they are fundamentally different in design, performance and application focus.
1. Kinematic Structure
- Hexapod: Six actuators operate simultaneously to control a single platform in all six degrees of freedom.
- 6-Axis Robot: Six joints are arranged in series, where each axis builds upon the previous one.
Hexapods avoid cumulative positioning errors, while serial robots accumulate error along the kinematic chain.
2. Accuracy, Stiffness and Error Propagation
- Hexapod: High stiffness, low moving mass, minimal backlash and no compounded axis errors. Suitable for sub-micron to nanometer positioning.
- 6-Axis Robot: Lower stiffness due to the cantilevered structure, with possible backlash in joints and cumulative positioning errors.
Hexapods are optimized for precision alignment and metrology, while robots prioritize flexibility and reach.
3. Workspace and Range of Motion
- Hexapod: Compact workspace with limited linear and angular travel, but highly precise motion within that range.
- 6-Axis Robot: Large workspace with extended reach and wide joint rotation, capable of accessing complex geometries.
Robots excel in large-area coverage, while hexapods are designed for localized high-precision positioning.
4. Dynamics and Control Behavior
- Hexapod: High dynamic response, coordinated multi-axis motion and built-in tool-center-point control for smooth, continuous adjustments.
- 6-Axis Robot: Joint-based motion requiring inverse kinematics and trajectory planning, typically with more vibration at the tool point.
Hexapods are ideal for real-time alignment and scanning tasks, while robots are better suited for path-based operations.
5. Typical Use Cases
Hexapod Applications
- Photonics alignment for fiber arrays and PICs
- Semiconductor metrology and wafer positioning
- Optical system alignment
- Laser beam steering and focusing
- Microscopy and nanopositioning
6-Axis Robot Applications
- Pick-and-place and material handling
- Welding, painting and assembly
- Palletizing and logistics
- Large-part manipulation
- General industrial automation
Conclusion
A hexapod is a precision positioning system designed for high accuracy and stability in a compact workspace. A traditional 6-axis robot is a flexible manipulation system optimized for reach, versatility and large-scale automation. Selecting the appropriate system depends on whether the primary requirement is precision or workspace flexibility. If precision in the nanometer realm is required, piezo nanopositioners are recommended.